Compressed sensing using forward-backward¶
This tutorial presents a compressed sensing problem solved by the forward-backward splitting algorithm. The problem can be expressed as follow :
where y are the measurements, A is the measurement matrix and tau is the regularization parameter.
The number of measurements M is computed with respect to the signal size N and the sparsity level K :
>>> N = 5000
>>> K = 100
>>> import numpy as np
>>> M = int(K * max(4, np.ceil(np.log(N))))
>>> print('Number of measurements : %d' % (M,))
Number of measurements : 900
>>> print('Compression ratio : %3.2f' % (float(N)/M,))
Compression ratio : 5.56
Note
With the above defined number of measurements, the algorithm is supposed to very often perform a perfect reconstruction.
We generate a random measurement matrix A :
>>> np.random.seed(1) # Reproducible results.
>>> A = np.random.standard_normal((M, N))
Create the K sparse signal x :
>>> x = np.zeros(N)
>>> I = np.random.permutation(N)
>>> x[I[0:K]] = np.random.standard_normal(K)
>>> x = x / np.linalg.norm(x)
Generate the measured signal y :
>>> y = np.dot(A, x)
The first objective function to minimize is defined by
which can be expressed by the toolbox L1-norm function object. It can be instantiated as follow, while setting the regularization parameter tau :
>>> from pyunlocbox import functions
>>> tau = 1.0
>>> f1 = functions.norm_l1(lambda_=tau)
The second objective function to minimize is defined by
which can be expressed by the toolbox L2-norm function object. It can be instantiated as follow :
>>> f2 = functions.norm_l2(y=y, A=A)
or alternatively as follow :
>>> A_ = lambda x: np.dot(A, x)
>>> At_ = lambda x: np.dot(np.transpose(A), x)
>>> f3 = functions.norm_l2(y=y, A=A_, At=At_)
Note
In this case the forward and adjoint operators were passed as functions not as matrices.
A third alternative would be to define the function object by hand :
>>> f4 = functions.func()
>>> f4._grad = lambda x: 2.0 * np.dot(np.transpose(A), np.dot(A, x) - y)
>>> f4._eval = lambda x: np.linalg.norm(np.dot(A, x) - y)**2
Note
The three alternatives to instantiate the function objects (f2, f3 and f4) are strictly equivalent and give the exact same results.
Now that the two function objects to minimize (the L1-norm and the L2-norm) are instantiated, we can instantiate the solver object. The step size for optimal convergence is \(\frac{1}{\beta}\) where \(\beta\) is the Lipschitz constant of the gradient of f2, f3, f4 given by:
To solve this problem, we use the forward-backward splitting algorithm which is instantiated as follow :
>>> step = 0.5 / np.linalg.norm(A, ord=2)**2
>>> from pyunlocbox import solvers
>>> solver = solvers.forward_backward(method='FISTA', step=step)
Note
A complete description of the constructor parameters and default
values is given by the solver object
pyunlocbox.solvers.forward_backward reference documentation.
After the instantiations of the functions and solver objects, the setting of a starting point x0, the problem is solved by the toolbox solving function as follow :
>>> x0 = np.zeros(N)
>>> ret = solvers.solve([f1, f2], x0, solver, rtol=1e-4, maxit=300)
Solution found after 176 iterations :
objective function f(sol) = 8.221302e+00
last relative objective improvement : 8.363264e-05
stopping criterion : RTOL
Note
A complete description of the parameters, their default values and
the returned values is given by the solving function
pyunlocbox.solvers.solve() reference documentation.
Let’s display the results :
>>> try:
... import matplotlib, sys
... cmd_backend = 'matplotlib.use("AGG")'
... _ = eval(cmd_backend) if 'matplotlib.pyplot' not in sys.modules else 0
... import matplotlib.pyplot as plt
... _ = plt.figure()
... _ = plt.plot(x, 'o', label='Original')
... _ = plt.plot(ret['sol'], 'xr', label='Reconstructed')
... _ = plt.grid(True)
... _ = plt.title('Achieved reconstruction')
... _ = plt.legend(numpoints=1)
... _ = plt.xlabel('Signal dimension number')
... _ = plt.ylabel('Signal value')
... _ = plt.savefig('doc/tutorials/cs_fb_results.pdf')
... _ = plt.savefig('doc/tutorials/cs_fb_results.png')
... except:
... pass
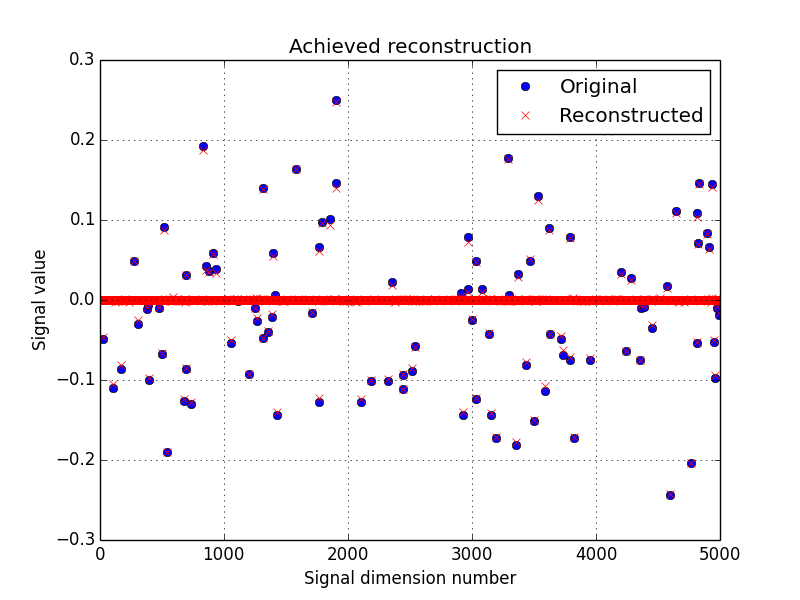
The above figure shows a good reconstruction which is both sparse (thanks to the L1-norm objective) and close to the measurements (thanks to the L2-norm objective).
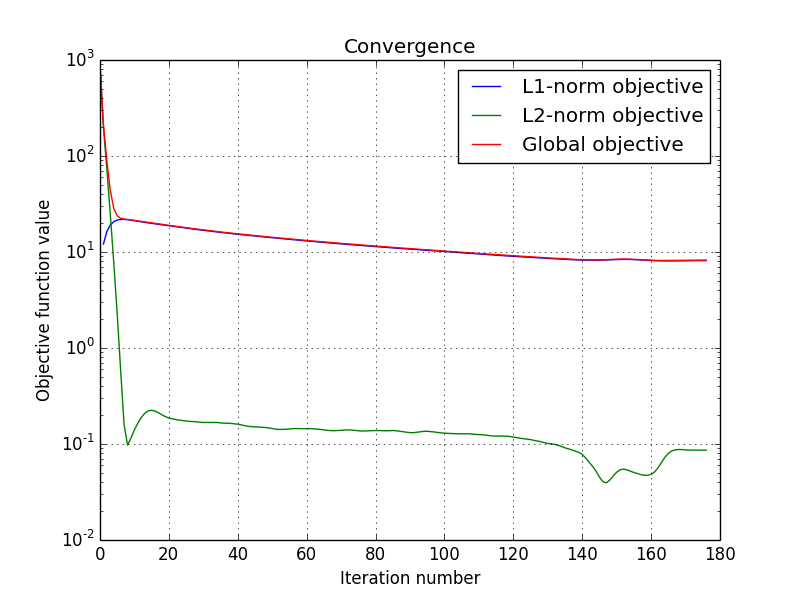
Let’s display the convergence of the two objective functions :
>>> try:
... objective = np.array(ret['objective'])
... _ = plt.figure()
... _ = plt.semilogy(objective[:, 0], label='L1-norm objective')
... _ = plt.semilogy(objective[:, 1], label='L2-norm objective')
... _ = plt.semilogy(np.sum(objective, axis=1), label='Global objective')
... _ = plt.grid(True)
... _ = plt.title('Convergence')
... _ = plt.legend()
... _ = plt.xlabel('Iteration number')
... _ = plt.ylabel('Objective function value')
... _ = plt.savefig('doc/tutorials/cs_fb_convergence.pdf')
... _ = plt.savefig('doc/tutorials/cs_fb_convergence.png')
... except:
... pass