Compressed sensing using douglas-rachford¶
This tutorial presents a compressed sensing problem solved by the douglas-rachford splitting algorithm. The problem can be expressed as follow :
where y are the measurements and A is the measurement matrix.
The number of measurements M is computed with respect to the signal size N and the sparsity level K :
>>> N = 5000
>>> K = 100
>>> import numpy as np
>>> M = int(K * max(4, np.ceil(np.log(N))))
>>> print('Number of measurements : %d' % (M,))
Number of measurements : 900
>>> print('Compression ratio : %3.2f' % (float(N)/M,))
Compression ratio : 5.56
Note
With the above defined number of measurements, the algorithm is supposed to very often perform a perfect reconstruction.
We generate a random measurement matrix A :
>>> np.random.seed(1) # Reproducible results.
>>> A = np.random.standard_normal((M, N))
Create the K sparse signal x :
>>> x = np.zeros(N)
>>> I = np.random.permutation(N)
>>> x[I[0:K]] = np.random.standard_normal(K)
>>> x = x / np.linalg.norm(x)
Generate the measured signal y :
>>> y = np.dot(A, x)
The first objective function to minimize is defined by
which can be expressed by the toolbox L1-norm function object. It can be instantiated as follow :
>>> from pyunlocbox import functions
>>> f1 = functions.norm_l1()
The second objective function to minimize is defined by
where \(i_S()\) is the indicator function of the set S which is zero if z is in the set and infinite otherwise. The set S is defined by \(\left\{z \in \mathbb{R}^N \mid \|A(z)-y\|_2 \leq \epsilon \right\}\). This function can be expressed by the toolbox L2-ball function object which can be instantiated as follow :
>>> f2 = functions.proj_b2(epsilon=1e-7, y=y, A=A, tight=False,
... nu=np.linalg.norm(A, ord=2)**2)
Now that the two function objects to minimize (the L1-norm and the L2-ball) are instantiated, we can instantiate the solver object. To solve this problem, we use the douglas-rachford splitting algorithm which is instantiated as follow :
>>> from pyunlocbox import solvers
>>> solver = solvers.douglas_rachford(gamma=1e-2)
After the instantiations of the functions and solver objects, the setting of a starting point x0, the problem is solved by the toolbox solving function as follow :
>>> x0 = np.zeros(N)
>>> ret = solvers.solve([f1, f2], x0, solver, rtol=1e-4, maxit=300)
Solution found after 35 iterations :
objective function f(sol) = 8.508725e+00
last relative objective improvement : 6.016694e-05
stopping criterion : RTOL
Let’s display the results :
>>> try:
... import matplotlib, sys
... cmd_backend = 'matplotlib.use("AGG")'
... _ = eval(cmd_backend) if 'matplotlib.pyplot' not in sys.modules else 0
... import matplotlib.pyplot as plt
... _ = plt.figure()
... _ = plt.plot(x, 'o', label='Original')
... _ = plt.plot(ret['sol'], 'xr', label='Reconstructed')
... _ = plt.grid(True)
... _ = plt.title('Achieved reconstruction')
... _ = plt.legend(numpoints=1)
... _ = plt.xlabel('Signal dimension number')
... _ = plt.ylabel('Signal value')
... _ = plt.savefig('doc/tutorials/cs_dr_results.pdf')
... _ = plt.savefig('doc/tutorials/cs_dr_results.png')
... except:
... pass
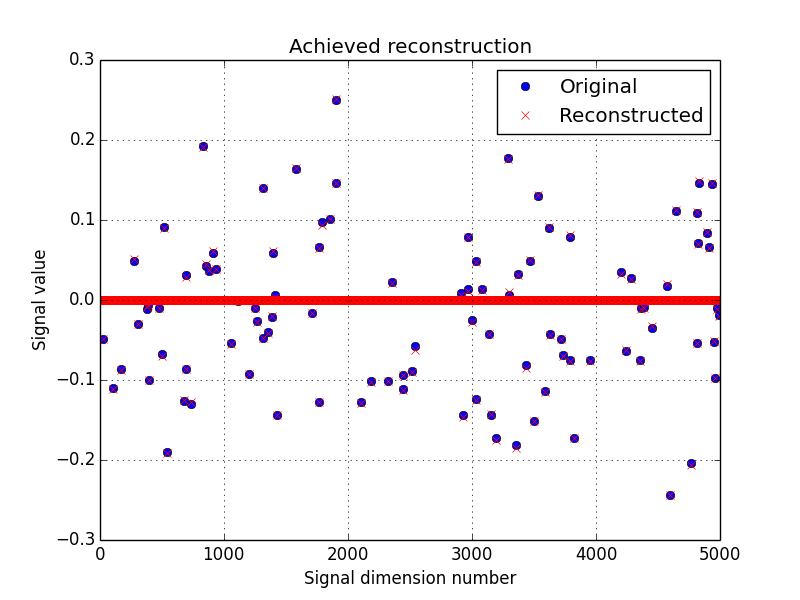
The above figure shows a good reconstruction which is both sparse (thanks to the L1-norm objective) and close to the measurements (thanks to the L2-ball constraint).
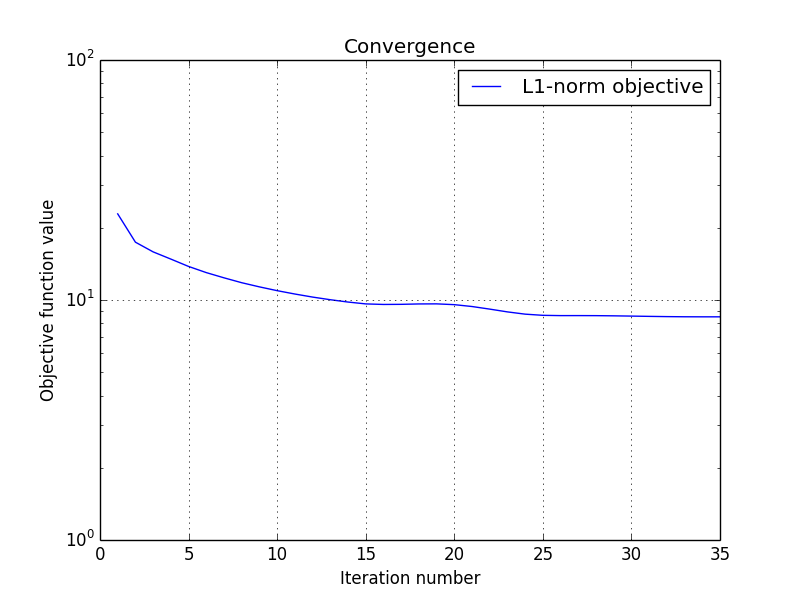
Let’s display the convergence of the objective function :
>>> try:
... objective = np.array(ret['objective'])
... _ = plt.figure()
... _ = plt.semilogy(objective[:, 0], label='L1-norm objective')
... _ = plt.grid(True)
... _ = plt.title('Convergence')
... _ = plt.legend()
... _ = plt.xlabel('Iteration number')
... _ = plt.ylabel('Objective function value')
... _ = plt.savefig('doc/tutorials/cs_dr_convergence.pdf')
... _ = plt.savefig('doc/tutorials/cs_dr_convergence.png')
... except:
... pass